66
4.2.6 Βηματικοί κινητήρες
Για την λειτουργία των βηματικών κινητήρων δημιουργήθηκαν συναρτήσεις που
επιτρέπουν την κίνηση του ρομπότ για συγκεκριμένο χρόνο με συγκεκριμένη ταχύτητα και
βήματα.
Οι βιβλιοθήκες που χρησιμοποιήθηκαν είναι η προ εγκατεστημένη βιβλιοθήκη time και η
RPi.GPIO. Στην συνέχεια, έγινε ο ορισμός και η ανάθεση των εξόδων του μικροεπεξεργαστή
σύμφωνα με την συνδεσμολογία που περιγράφεται στον πίνακα (Πίνακας 9).
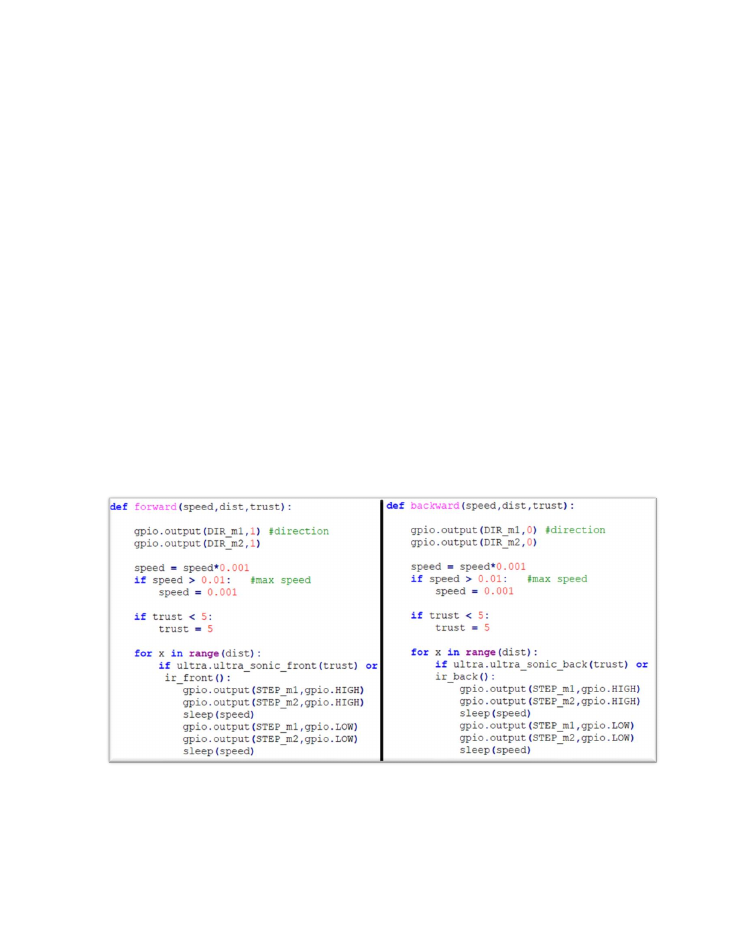
Οι συναρτήσεις forward() και backward() (Εικόνα 40) είναι υπεύθυνες για κίνηση
του ρομπότ μπροστά και πίσω και δέχονται σαν ορίσματα την ταχύτητα, την απόσταση που θα
διανύσει και την απόσταση που θα σταματήσει το ρομπότ αν εντοπίσει κάποιο εμπόδιο. Για λόγους
ασφαλείας η ταχύτητα δεν μπορεί να είναι μεγαλύτερη από 10 μονάδες και η τιμή της απόστασης
μικρότερη από πέντε εκατοστά.
Οι συναρτήσεις right() και left()(Εικόνα 41) ελέγχουν την στροφή του ρομπότ
δεξιά και αριστερά. Δέχονται σαν ορίσματα την ταχύτητα, την απόσταση, την κατεύθυνση κίνηση
και την απόσταση που θα σταματήσει το ρομπότ αν βρεθεί κάποιο εμπόδιο.
Εικόνα 40: Συναρτήσεις κίνησης του ρομπότ μπροστά/πίσω