99
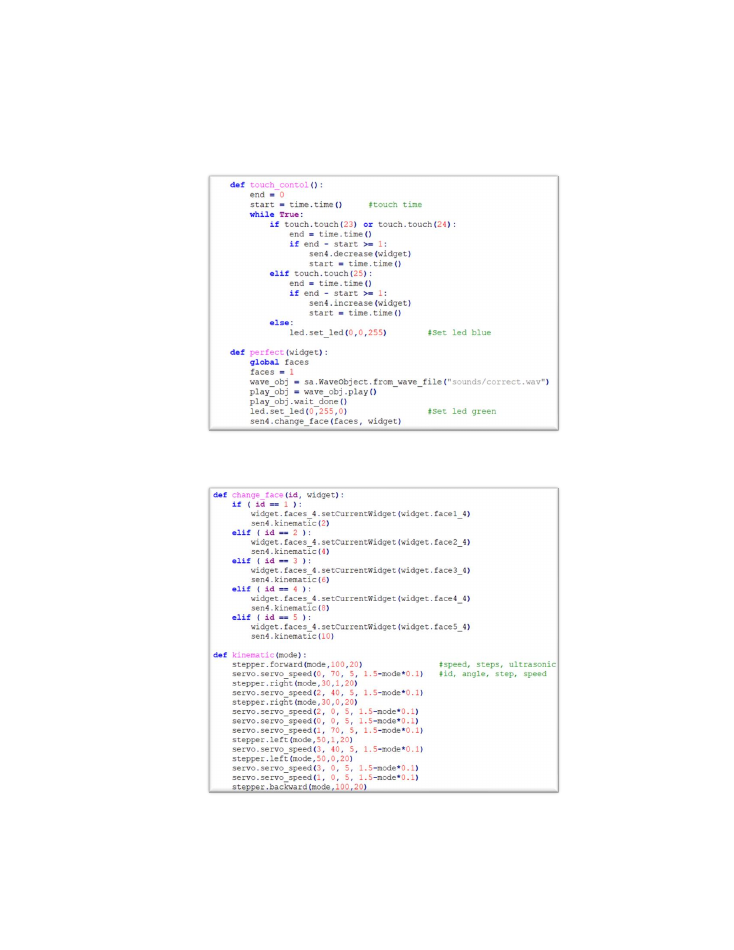
Με την εναλλαγή κατάστασης εκτελείται η συνάρτηση kinematic() (Εικόνα 78) που
εκτελεί το κινηματικό μοντέλο των κινήσεων του ρομπότ ανάλογα με την κατάσταση στην οποία
βρίσκεται.
Εικόνα 77: Συναρτήσεις σεναρίου «Κοινωνική Συμπεριφορά»
Εικόνα 78: Συναρτήσεις αλλαγής διάθεσης και κίνηση σεναρίου «Κοινωνική Συμπεριφορά»