56
Raspberry Pi 4. Τέλος, η στεφάνη διόδων εκπομπής φωτός (LED) τροφοδοτείται με τάση εισόδου
5V και δέχεται εντολές μέσω ενός ακροδέκτη από τον μικροεπεξεργαστή.
Ο χειρισμός των σέρβο κινητήρων από τον μικροεπεξεργαστή διεκπεραιώνεται σύμφωνα
με το πρωτόκολλο επικοινωνίας Inter-Integrated Circuit (I2C). Το συγκεκριμένο πρωτόκολλο
χρησιμοποιεί δύο ακροδέκτες, ένα για τα δεδομένα (SDA) και ένα για τον συγχρονισμό του
ρολογιού (SDL). Ο ελεγκτή PCA9685 PWM, ο οποίος είναι υπεύθυνος για τον χειρισμό των σέρβο
κινητήρων, τροφοδοτείται από τον υποβιβαστή τάσης (Step Down Voltage Regulator) με 5V.
Τέλος, οι σέρβο κινητήρες συνδέονται στην κάτω μεριά της πλακέτας σε κάθετη διάταξη μέσω
τριών ακροδεκτών PWM, V++ και GND. Στο ρομπότ χρησιμοποιήθηκαν έξι σέρβο κινητήρες
MG995 γωνίας 0-180 μοιρών.
Για την φωνητική και ακουστική επικοινωνία του χρήστη με το ρομπότ, χρησιμοποιήθηκαν
ένα μικρόφωνο βύσματος (jack) 3.5 mm, και ένα σετ ηχείων με είσοδο βύσμα (jack) 3.5 mm.
Προκειμένου τα δύο αυτά εξαρτήματα να συνδεθούν στην θύρα εισόδου/εξόδου ήχου (audio jack)
της πλακέτας, χρησιμοποιήθηκε ένας σύνδεσμος (audio splitter).
Η οθόνη αφής 7 ιντσών συνδέθηκε στον μικροεπεξεργαστή μέσω της θύρας DSI (Display
Serial Interface) που διαθέτει το Raspberry Pi 4. H κάμερα Pi Camera συνδέθηκε στον
μικροεπεξεργαστή στην θύρα CSI (Camera Serial Interface), η οποία βρίσκεται και αυτή πάνω στο
Raspberry Pi 4.
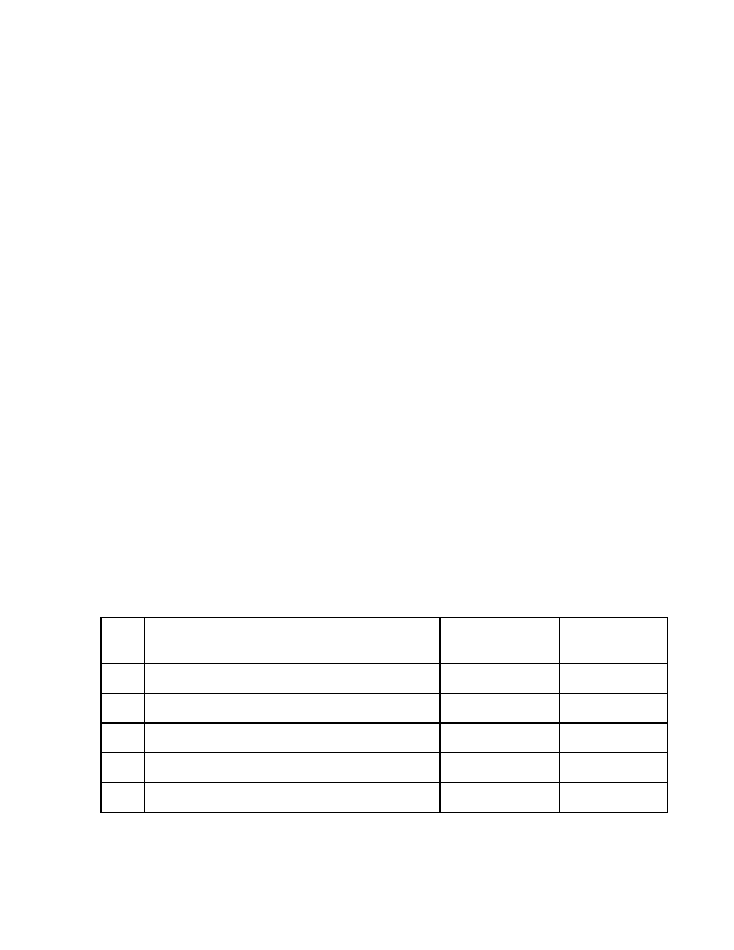
Όλοι οι ακροδέκτες (Εικόνα 32) που συνδέουν τα επιμέρους στοιχεία συνοψίζονται στον
παρακάτω πίνακα (Πίνακας 9).
Α/Α
Εξάρτημα
Τροφοδοσία (V)
Pin του
Raspberry Pi 4
1
Οδηγός βηματικού κινητήρα TB6560 Νο1
12
29, 31
2
Οδηγός βηματικού κινητήρα TB6560 Νο2
12
38, 40
3
Υπέρυθρος αισθητήρας hw-006 V1.3 Νο1
5
21
4
Υπέρυθρος αισθητήρας hw-006 V1.3 Νο2
5
23
5
Υπέρηχος αισθητήρας hy-srf05 Νο1
5
11, 13