89
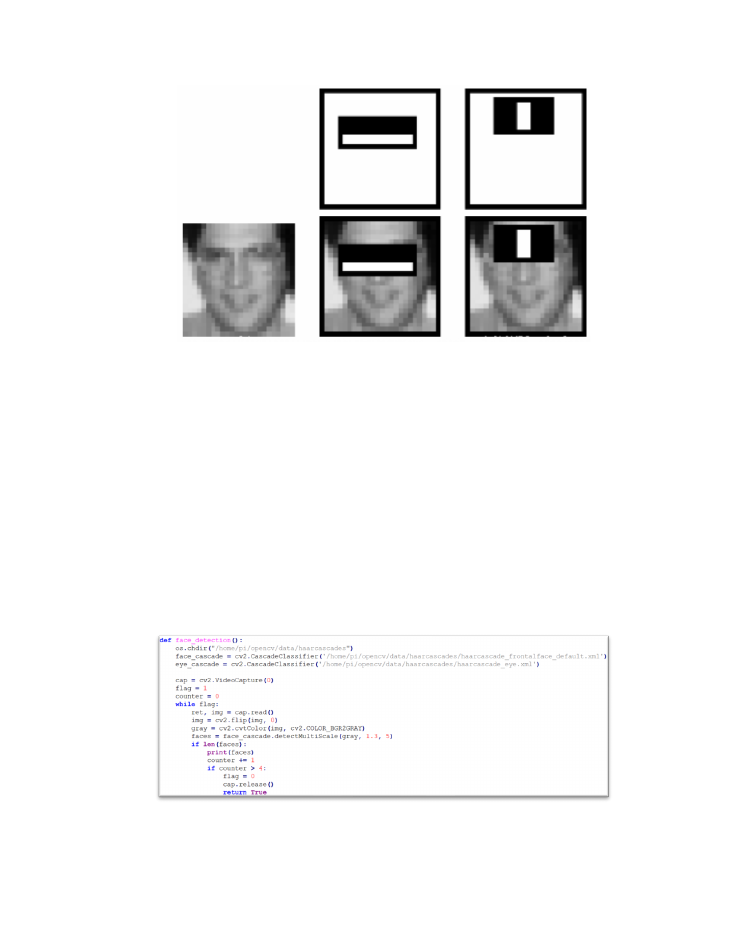
Εικόνα 64: Παράδειγμα εντοπισμού προσώπου
Η συνάρτηση face_detection() (Εικόνα 65) εντοπίζει μέσω της Pi camera και του
OpenCV τα πρόσωπα που το κοιτάνε το ρομπότ. Η συνάρτηση επιστρέφει μια αληθείς τιμή όταν
κάποιο πρόσωπο κοιτάξει το ρομπότ. Στην συνέχεια οι συναρτήσεις perfect(),
decrease(), increase() (
Εικόνα 66) καλούν την συνάρτηση change_face(), η
οποία εκτελεί το κινηματικό μοντέλο και αλλάζει την διάθεση του ρομπότ (Εικόνα 67). Η
συνάρτηση change_state() (Εικόνα 68) ελέγχει την τιμή του μπροστινού υπερηχητικού
αισθητήρα και στην περίπτωση που είναι μικρότερη των 40 εκατοστών οπισθοχωρεί. Στην
περίπτωση εντοπισμού προσώπου η συνάρτηση change_state() καλεί την συνάρτηση
decrease()
για την αλλαγή της διάθεσης του ρομπότ.
Εικόνα 65: Συνάρτηση εντοπισμού προσώπου σεναρίου «Ειδική Ενσυναίσθηση»