64
4.2.3 Επαγωγικοί αισθητήρες αφής
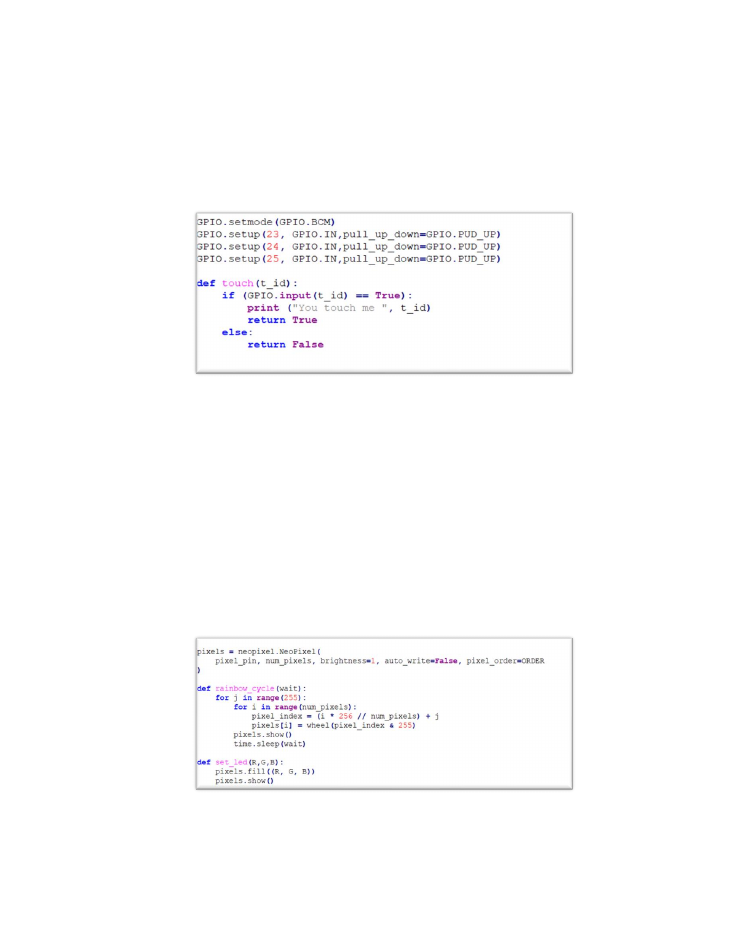
Το ρομπότ διαθέτει τρεις επαγωγικούς αισθητήρες αφής. Ένας έχει τοποθετηθεί στο κεφάλι
και αλλοι δύο στους ώμους. Η συνάρτηση touch() (Εικόνα 36) δέχεται σαν όρισμα το id (1-
3) του αισθητήρα και επιστρέφει μια αληθής τιμή boolean όταν ενεργοποιείται ο αισθητήρας.
Εικόνα 36: Συνάρτηση ελέγχου επαγωγικών αισθητήρων αφής
4.2.4 Δίοδοι εκπομπής φωτός
Για λειτουργία της στεφάνης led χρησιμοποιήθηκε η βιβλιοθήκη board και neopixel
(Εικόνα 37). Η συνάρτηση rainbow_cycle() δέχεται σαν όρισμα την ταχύτητα της κυκλική
εναλλαγής των χρωμάτων των led. Η συνάρτηση set_led() αξιοποιεί την κλάση της
βιβλιοθήκης neopixel pixels.fill και δέχεται σαν ορίσματα τον κωδικό του χρώματος σε RGB (Red,
Green, Blue).
Εικόνα 37: Συνάρτηση διόδων εκπομπής φωτός